基于状态空间描述(见状态空间法)对混有噪声的信号进行滤波的方法,简称卡尔曼滤波。这种方法是R.E.卡尔曼和R.S.布什于1960和1961年提出的。卡尔曼滤波是一种切实可行和便于应用的滤波方法,其计算过程通常需要在计算机上实现。实现卡尔曼滤波的装置或软件称为卡尔曼滤波器。
-
特点
综述
从混有噪声(干扰)的信号中滤除噪声、提取有用信号是滤波的基本目的。在卡尔曼滤波出现以前,已经建立了采用最小二乘法处理观测数据和采用维纳滤波方法处理平稳随机过程的滤波理论。但这些滤波方法或因功能不够,或因条件要求苛刻,而不便于实用。卡尔曼滤波是在克服以往滤波方法的局限性的基础上提出来的,是滤波方法的重大演进。优点
卡尔曼滤波比维纳滤波有以下优点:①在卡尔曼滤波中采用物理意义较为直观的时间域语言,而在维纳滤波中则采用物理意义较为间接的频率域语言。②卡尔曼滤波仅需要有限时间内的观测数据,而维纳滤波则需要用过去的半无限时间内的全部观测数据。③卡尔曼滤波可使用比较简单的递推算法,而维纳滤波则需要求解一个积分方程。④卡尔曼滤波可以推广到非平稳随机过程的情况,而维纳滤波只适用于平稳随机过程。⑤卡尔曼滤波所需数据存储量较小,便于用计算机进行实时处理,而维纳滤波的计算复杂,步骤冗长,不便于实时处理。在相同条件下,卡尔曼滤波能得出与维纳滤波相同的结果。在实用上,卡尔曼滤波比维纳滤波功能强,用途广。卡尔曼滤波已在航天技术、通信工程、工业控制等领域中得到比较广泛的应用。卡尔曼滤波的局限性表现在只能用于线性的信号过程,即状态方程和观测方程都是线性的随机系统,而且噪声必须服从高斯分布。虽然不少实际问题都可满足这些限制条件,但当实际系统的非线性特性稍强或者噪声特性偏离高斯分布较大时,卡尔曼滤波就不能给出符合实际的结果。最优估计技术
卡尔曼滤波是一种最优估计技术。工程中,为了了解工程对象(滤波中称为系统)的各个物理量(滤波中称为状态)的确切数值,或为了达到对工程对象进行控制的目的,必须利用测量手段对系统的各个状态进行测量。但是,量测值可能仅是系统的部分状态或是部分状态的线性组合,且量测值中有随机误差(常称为量测噪声)。最优估计就是针对上述问题的一种解决方法。它能将仅与部分状态有关的测量进行处理,得出从某种统计意义上讲误差最小的更多状态的估值。误差最小的标准常称为估计准则,根据不同的的估计准则和估计计算方法,有各种不同的最优估计,卡尔曼滤波是一种递推线性最小方差估计。 -
方程描述
原理 线性离散随机系统用如下离散时间的动态方程和观测方程描述:式中 x和 z分别为系统的状态向量和观测向量, &owega;和 v均为零均值的高斯白噪声,Ф、Γ 和 H为系统矩阵,下标 k表示离散时间。假定初态 x0的均值 Ex0=塣0( E表示均值)和方差阵var x0= P0(var表示方差)均为已知,且最小方差意义下 xk的最优线性估值悯 k已经求得,则有悯 k+1| k=Ф k悯 k。其中悯 k+1| k表示悯 k+1在 xk的最优估值为悯 k的条件下的一步最优预测估值。相应的误差方差阵则
 公式
(上标T表示矩阵转置),其
公式
(上标T表示矩阵转置),其 公式
一步最优预测估值悯 k+1|k需要经观测值 zk+1的修正后才能得到 xk+1的最优估值悯 k+1,即
公式
一步最优预测估值悯 k+1|k需要经观测值 zk+1的修正后才能得到 xk+1的最优估值悯 k+1,即 公式
这个方程右端的第二项表示校正项,其中括号内的项称为新息。 Kk+1 称为增益阵。因此卡尔曼滤波方法可直观表述为在一步最优预测估值的基础上增加新息校正。新息是由第 k+1步观测决定的,其中包含由噪声引起的观测误差。增益矩阵 Kk+1对它有调节作用,当噪声很大时 Kk+1的元会自动地取较小的值,反之则取较大的值。卡尔曼滤波的四个递推方程是:
公式
这个方程右端的第二项表示校正项,其中括号内的项称为新息。 Kk+1 称为增益阵。因此卡尔曼滤波方法可直观表述为在一步最优预测估值的基础上增加新息校正。新息是由第 k+1步观测决定的,其中包含由噪声引起的观测误差。增益矩阵 Kk+1对它有调节作用,当噪声很大时 Kk+1的元会自动地取较小的值,反之则取较大的值。卡尔曼滤波的四个递推方程是: 公式
式中 Rk= Evk
公式
式中 Rk= Evk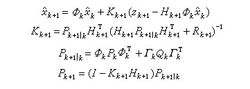 公式
公式